


搭载人形上半身和高自由度运动手臂,配有可上下移动的升降机构和多种末端执行器,如灵巧手、柔性夹爪和平行夹爪。

全身42个主动自由度 ·自研灵巧手、关节模组 ·自研通用具身智能系统,赋能工业、商业、家庭等多场景

融合多模态感知与智能控制技术综合性工业自动化系统,集高精度协作机器人、激光雷达AGV和英特尔实感深度相机于一体,具备视觉、移动与操作协同能力。

平台包含多模态感知、多模态数据训练、算法验证、模型构建、机器人姿态模仿、机器人动作跟随、运动记录复现以及语音控制等多个维度,为具身智能系统的开发提供了强有力的支持。

全身13个自由度 ·自研关节模组·智能情感引擎系统,融合音、视、触多模态交互

全身16+1(头)个自由度 ·自研关节模组·智能系统,融合音、视、触多模态交互

实训平台集成视觉识别系统、触觉识别系统、环境识别系统、语音识别系统四大感知模块,搭配协作机器人与电气控制系统形成 “感知 - 决策 - 执行”闭环。
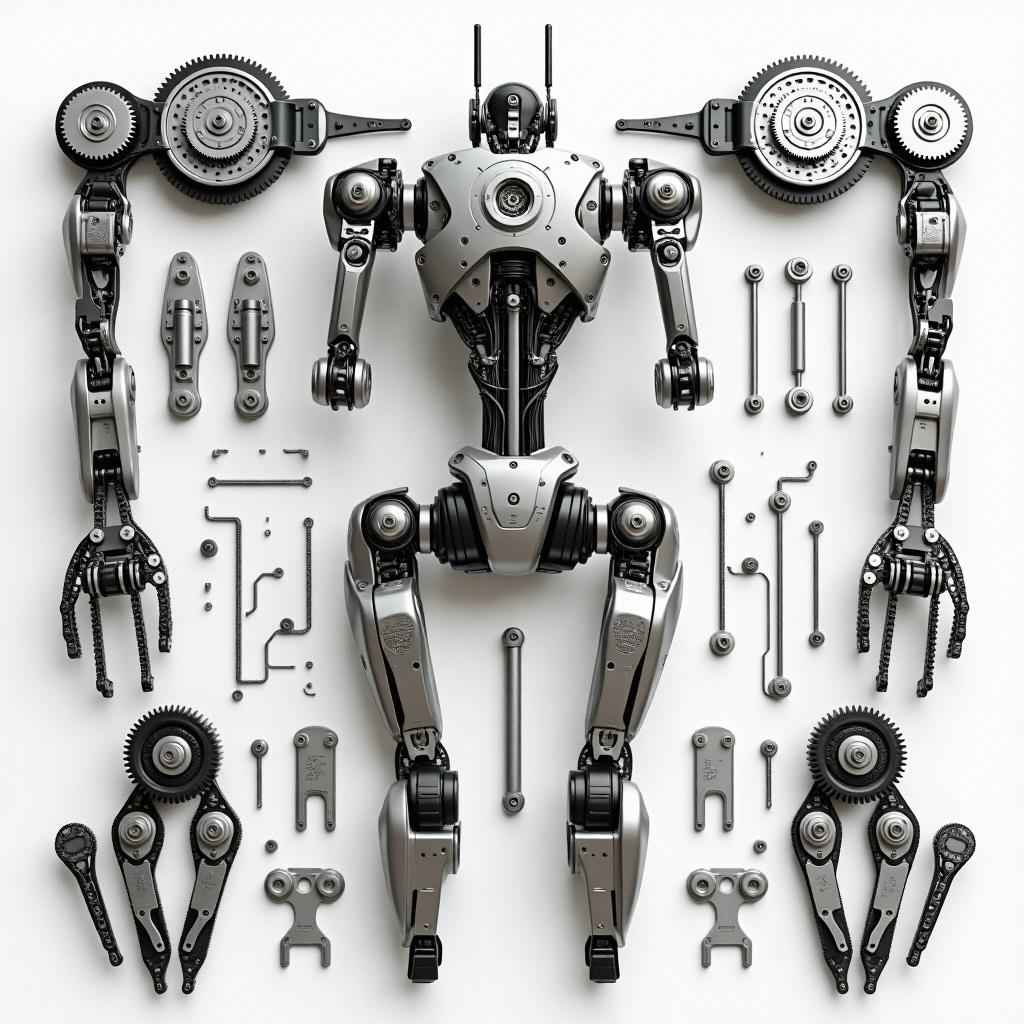
设备采用模块化设计,将机器人拆分为独立功能模块(如腿部、手臂、主 控板),支持快速拆装与功能验证;关键部件通过外部裸露,直观展示内部机械 传动与电路布局,将抽象原理转化为可视过程;集成调试接口与防护机制,支持 学生动手操作与编程开发,激发学习兴趣。

采用 3D技术与交互式动画相结合的方式,仿真拆装机器人机械结构,通过对机器人的 3D 模拟仿真拆装训练,可以在线将每个轴拆卸成独立的零部件,让 学生掌握机器人的硬件组成、机器人结构分析、机器人电机安装、减速器安装等 机器人安装技能。

多样化场景创建、感知模型集成和行为规划与控制算法,基于NVIDIA Isaac Sim的虚拟仿真开发平台,专为促进具身人工智能与机器人技术的协作研究而设计。
Copyright © 2018-2025 深圳蓝木教育科技有限公司 版权所有
ICP备案/许可证号:粤ICP备2023046272号-1